AUTOSAR Adaptive on Central Compute: When the Classic Platform Becomes the Bottleneck
AUTOSAR Classic Platform has been the backbone of automotive embedded software for over two decades. It brought standardization to a domain that desperately needed it — enabling software component reuse across suppliers, separating application logic from hardware, and providing a validated foundation for safety-critical ECUs. For the deeply embedded control functions it was designed for, Classic remains the right choice. The problem is not that Classic is failing at its original job. The problem is that vehicle E/E architectures have shifted underneath it, and the assumptions baked into Classic's design — static configuration, signal-based communication, microcontroller-class hardware — fit poorly with the direction automotive computing is taking.
Central compute platforms running ADAS perception pipelines, OTA update orchestration, vehicle API gateways, and connected services operate on SoCs with multiple CPU cores, gigabytes of RAM, and Ethernet TSN connectivity. These are not the deeply embedded microcontrollers that Classic was built for. When engineering teams try to run Classic Platform on this hardware, or try to use Classic's communication model to handle sensor fusion data volumes and dynamic service discovery, the architecture becomes the bottleneck rather than the enabler.
What Classic Platform Was Built to Do — and Where That Stops Working
Classic AUTOSAR targets resource-constrained ECUs with hard real-time requirements. Its architecture is fundamentally static: the software component topology, communication matrix, and task scheduling are all determined at build time and compiled into a fixed configuration. The Runtime Environment generates a hardware-specific connector layer from this configuration, binding software components to their communication signals and hardware abstractions.
This static approach is a feature, not a limitation, for the applications Classic handles. An ABS controller, a powertrain ECU, or a body control module needs deterministic timing, predictable memory layout, and a software stack that has been exhaustively validated against a known configuration. The OSEK/VDX-based operating system provides exactly that: fixed task priorities, static memory allocation, no dynamic loading of code. Functional safety certification under ISO 26262 is straightforward when the software topology cannot change at runtime.
The constraints that make Classic ideal for these functions become structural problems on a central compute platform:
- Communication bandwidth: Classic uses signal-based communication over CAN or FlexRay, where each data element is mapped to a signal ID and transmitted on a fixed schedule. A camera sensor generating raw frames, a LiDAR point cloud, or a V2X message stream cannot be mapped efficiently into this model. The data volumes require Ethernet, and the communication patterns require dynamic service discovery rather than a pre-defined signal matrix.
- Dynamic deployment: A central compute unit running multiple vehicle functions needs to update, start, and stop individual application modules without rebooting the ECU or regenerating the entire RTE configuration. Classic's static architecture makes this impossible by design. Every software change requires a full rebuild and reflash.
- Multi-core SoC utilization: Modern automotive SoCs — the Qualcomm SA8540P, NXP S32G series, Renesas R-Car series — have heterogeneous core configurations mixing application-class ARM Cortex-A clusters with real-time Cortex-R or Cortex-M cores. Classic Platform targets microcontrollers, not SoC-class processors. Classic Platform targets microcontrollers and real-time cores — Cortex-R and Cortex-M class processors. Modern automotive SoCs integrate these alongside application-class Cortex-A clusters, but Classic cannot utilize the Cortex-A cores: it has no POSIX OS support, no dynamic memory model, and no ability to leverage the hypervisor-based resource partitioning that Cortex-A hardware provides. The compute capability of the SoC's application processor cluster remains inaccessible to Classic-based software.
- OTA update model: Classic ECU updates require replacing the full software image as a unit. For a central compute platform managing multiple functional domains simultaneously, this monolithic update model creates update windows and rollback complexity that conflicts with the continuous delivery expectations of software-defined vehicle programs.
What Adaptive Platform Provides and Why It Was Introduced
AUTOSAR Adaptive Platform was introduced in 2017 specifically to address the requirements that Classic could not meet. Its design starts from a different set of assumptions: POSIX-compliant operating system, dynamic memory allocation, C++ application model, service-oriented communication, and runtime service discovery. These are not incremental improvements to Classic — they are a different architectural approach targeting a different class of hardware and a different category of application.
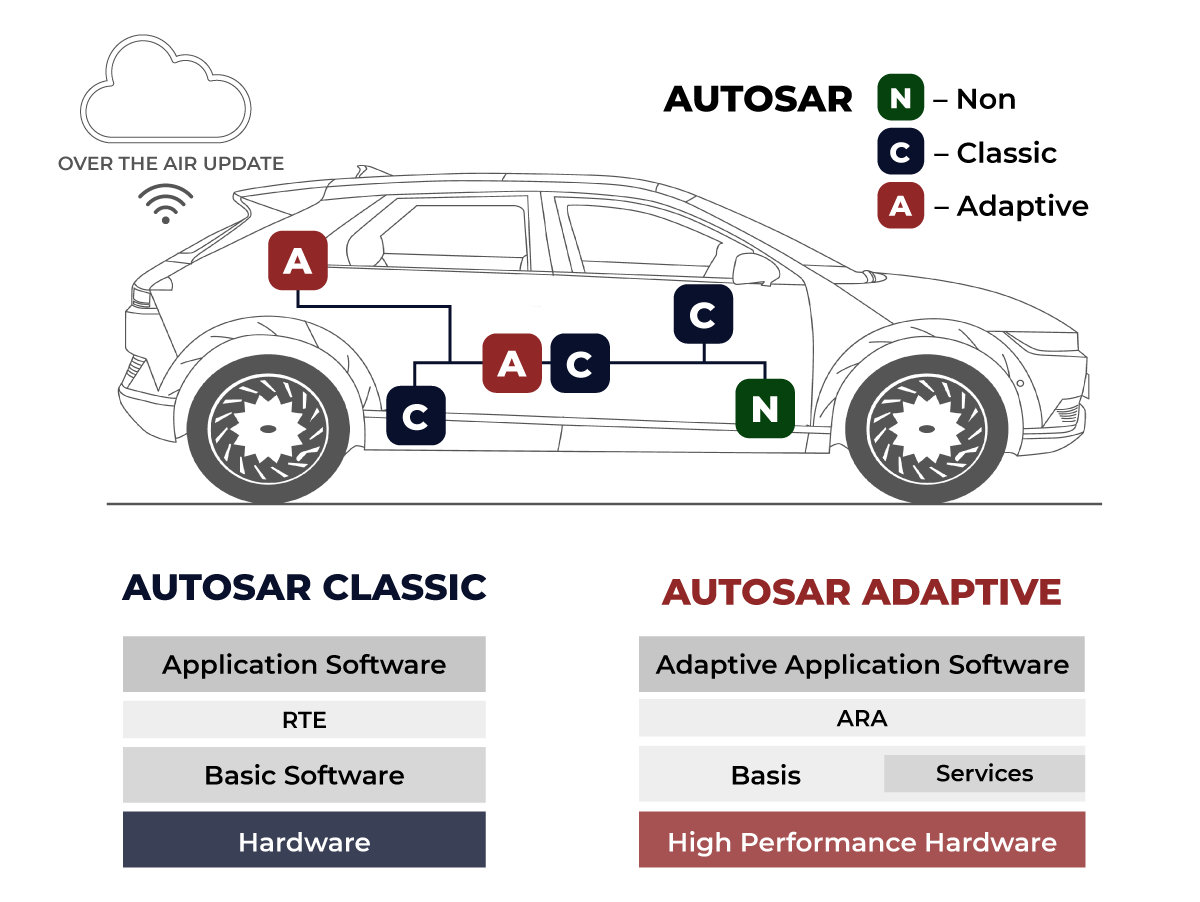
The core runtime model in Adaptive is built around the ARA — AUTOSAR Runtime for Adaptive Applications — which defines a standardized C++ API layer through which Adaptive Applications access platform services. The functional clusters within ARA cover execution management, communication management, diagnostics, state management, persistency, and security. Applications written against ARA are hardware-independent: they call standardized interfaces and the platform handles the mapping to OS resources, network interfaces, and hardware acceleration.
The communication model replaces Classic's static signal matrix with service-oriented architecture using SOME/IP over Automotive Ethernet. A camera service registers itself with the Service Discovery mechanism and announces the data it provides. An ADAS fusion module discovers and subscribes to that service dynamically at runtime. New sensor modules can be added to the system and discovered without rebuilding any other component. This runtime binding is what enables modular deployment and incremental update patterns that central compute platforms require.
The table below captures the fundamental architectural differences between the two platforms:
| Dimension | Classic Platform | Adaptive Platform |
| Target hardware | Microcontrollers (OSEK/VDX OS) | SoCs, HPC ECUs (POSIX OS) |
| Configuration model | Static, build-time | Dynamic, runtime service discovery |
| Communication protocol | CAN, FlexRay, LIN (signal-based) | Automotive Ethernet, SOME/IP, DDS |
| Application language | C with AUTOSAR SWC model | Modern C++ with ARA interfaces |
| Update model | Full image flash | Per-service OTA deployment |
| OS | OSEK/VDX, static scheduling | Linux, QNX, Integrity (POSIX) |
| Memory management | Static allocation | Dynamic, managed by execution manifest |
| Virtualization support | Limited | Hypervisor integration supported |
The Coexistence Reality — Neither Platform Replaces the Other
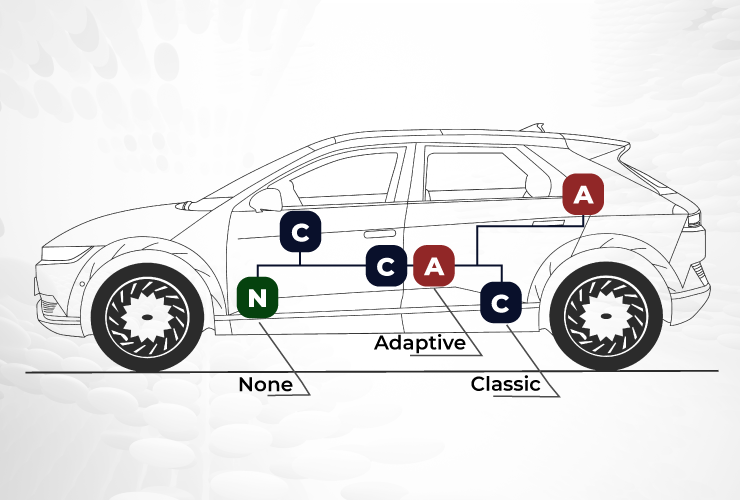
A recurring misconception in automotive software architecture discussions is that the shift to Adaptive Platform means migrating away from Classic. It does not. Classic and Adaptive are designed to coexist within the same vehicle, each handling the functions it was built for. AUTOSAR R24-11, released in December 2024, continues to develop both platforms in parallel and in the same release cycle, with growing integration mechanisms between them.
The coexistence model divides the vehicle E/E architecture along functional boundaries:
Classic Platform remains the right choice for:
- Powertrain and engine control
- Chassis control: ABS, ESC, EPS
- Body control modules
- HVAC and comfort ECUs
- Any function requiring hard real-time determinism with ASIL C or ASIL D integrity and a stable, long-proven qualification package
Adaptive Platform is the appropriate choice for:
- Central compute units running ADAS and automated driving stacks
- Vehicle API gateways and V2X connectivity modules
- OTA orchestration and software update management
- Infotainment and IVI systems on high-performance SoCs
- Domain controllers consolidating multiple non-real-time functions
The communication bridge between the two worlds is handled by gateway ECUs or middleware layers that translate between Classic's signal-based CAN/FlexRay messages and Adaptive's SOME/IP service events. Research implementations have demonstrated this coexistence using Infineon AURIX TC397 microcontrollers running Classic AUTOSAR tasks alongside Intel Atom x6425E embedded boards running Adaptive on POSIX Linux, with CAN FD providing the legacy signal bridge and 100 Mbps Ethernet carrying SOME/IP traffic between the two domains.
The AUTOSAR R24-11 release added an Automotive API Gateway based on the VISS protocol, which formalizes the interface between in-vehicle Adaptive services and external connectivity — a recognition that the Central Compute unit is increasingly the integration point between the vehicle's internal service mesh and cloud backend services.
Migration Patterns and the Engineering Complexity That Comes With Them
Moving functions from Classic to Adaptive — or designing new functions natively in Adaptive — involves engineering decisions that go well beyond changing the communication protocol and OS. The migration path from a Classic software component to an Adaptive application restructures the entire software design approach.
In Classic, a software component is defined by its ARXML description, with ports, interfaces, and runnables all specified in the component model. The RTE generator produces the connector code. In Adaptive, the equivalent is an application defined by its execution manifest and service interfaces, implemented in C++ using ARA calls, packaged as a Linux-style executable. The toolchain, the development workflow, the testing approach, and the safety qualification evidence structure are all different.
Several migration anti-patterns appear consistently in programs that underestimate this transition:
- Porting Classic SWCs to Adaptive without restructuring the communication model. A component that communicated via CAN signals in Classic and is ported to Adaptive while still using a polling model over SOME/IP does not benefit from the SOA architecture and may perform worse than the original.
- Retaining Classic-style static configuration assumptions in the Adaptive design. The execution manifest in Adaptive is not a replacement for Classic's ARXML signal matrix. Treating it as such prevents the team from implementing dynamic service discovery and runtime deployment, which are the primary technical justifications for adopting Adaptive.
- Insufficient attention to the mixed-criticality partitioning required when Adaptive runs alongside safety-critical functions on the same SoC. A hypervisor or OS-level partition boundary must be established between the Adaptive applications and any ASIL-relevant functions. Without this boundary, the safety case for the ASIL partition is compromised by the dynamically loaded Adaptive environment running on the same hardware.
- Underestimating toolchain maturity gaps. Classic AUTOSAR has two decades of toolchain development behind it: AUTOSAR Builder, EB tresos, Vector DaVinci, and equivalent tools handle ARXML management, RTE generation, and BSW configuration with well-understood workflows. Adaptive toolchains are younger and have more variability between implementations. Teams moving to Adaptive for the first time frequently spend more time on toolchain integration than on application development.
Platform Selection in Practice — Decision Criteria for Product Teams
The architectural choice for a new ECU program is not simply Classic versus Adaptive. For most programs, the question is where on the vehicle architecture this ECU sits, what functions it consolidates, and what the update and lifecycle model is for those functions. The answers to these questions largely determine the platform.
A useful framing maps the decision against four criteria:
| Criterion | Points to Classic | Points to Adaptive |
| Real-time control | Hard real-time, deterministic | Soft real-time, best-effort acceptable |
| Data bandwidth | Low, signal-based (CAN/FlexRay) | High, service-based (Ethernet) |
| Update frequency | Infrequent full-image flash | Frequent per-service OTA |
| Safety integrity | ASIL C/D, full qualification required | Safety-adjacent, mixed criticality with hypervisor |
For zonal controllers — the growing category of ECUs that consolidate functions from multiple former domain controllers into a zone-specific compute node — the architecture is typically a hybrid: Classic handles the real-time control functions running on an AURIX or equivalent safety MCU, while Adaptive runs on the application processor managing communication, diagnostics, and service exposure to the central compute. This split is visible in production programs from Volkswagen, Stellantis, and BMW, where zonal ECU clusters use AUTOSAR Adaptive for the service layer and Classic for the control layer.
The AUTOSAR middleware market was estimated at approximately USD 1.63 billion in 2023 and is projected to grow at roughly 11 percent CAGR through 2030, with Adaptive Platform capturing an increasing share as OEM programs shift toward centralized compute architectures. This growth trajectory reflects a real production-scale adoption shift, not only R/D experimentation — Adaptive deployments are moving from pilot programs to production vehicle lines.
For engineering teams designing ECU software from concept to production validation, the implication is that both platforms need to be in scope simultaneously, with the partition between them defined explicitly rather than assumed. The cost of discovering mid-program that a function's communication model does not fit the chosen platform is high: it typically triggers either a partial rewrite or an architectural workaround that creates technical debt across the program lifecycle. Teams with prior experience across both platforms — including companies that have handled CP-to-AP migrations for automotive customers — tend to front-load this partition analysis in the concept phase, before the software architecture is committed.
Quick Overview
AUTOSAR Classic Platform remains the standard for deeply embedded, safety-critical automotive ECUs requiring deterministic real-time behavior and static software configurations. AUTOSAR Adaptive Platform addresses a different segment: high-performance central compute units running service-oriented applications, ADAS stacks, connectivity services, and OTA-managed software on POSIX-based SoCs. The two platforms are designed to coexist within the same vehicle architecture, with Classic and Adaptive nodes communicating through defined gateway layers.
Key Applications
Zonal controllers combining real-time Classic control functions with Adaptive service management layers, central compute units running L2+ and L3 ADAS perception and planning stacks, vehicle API gateway ECUs managing SOME/IP service exposure to cloud backends, OTA update orchestration modules on high-performance SoCs, and infotainment and IVI platforms requiring dynamic application deployment.
Benefits
Adaptive Platform enables per-service OTA updates without full image reflash, runtime service discovery without build-time reconfiguration, and efficient utilization of multi-core SoC hardware through POSIX OS resource management. The ARA standardized API layer allows applications developed against Adaptive interfaces to remain hardware-independent across SoC generations. AUTOSAR's annual co-release of Classic and Adaptive specifications maintains integration consistency between the two platforms.
Challenges
Migration from Classic to Adaptive requires complete redesign of the communication model, not only a toolchain change. Safety partitioning between Adaptive applications and ASIL-rated functions on shared SoC hardware requires hypervisor integration with validated partition boundaries. Adaptive toolchains are less mature than Classic equivalents. Backward compatibility between Adaptive specification versions is not guaranteed, and upgrading to a newer release may require targeted rework.
Outlook
Adaptive Platform adoption is moving from R/D pilots to production vehicle programs at major OEMs including Volkswagen, Stellantis, and BMW. The AUTOSAR middleware market is projected to grow at approximately 11 percent CAGR through 2030, with Adaptive capturing an increasing share as centralized compute architectures scale. AUTOSAR R24-11 introduced the Automotive API Gateway based on VISS, formalizing Adaptive's role as the integration point between in-vehicle service meshes and external connectivity infrastructure. Zonal architecture programs starting design in 2025 and beyond will predominantly use hybrid Classic-Adaptive stacks.
Related Terms
AUTOSAR Classic Platform, AUTOSAR Adaptive Platform, ARA, SOME/IP, service-oriented architecture, OSEK/VDX, RTE, ARXML, SWC, Automotive Ethernet, Ethernet TSN, POSIX, execution manifest, OTA firmware update, hypervisor, zonal architecture, central compute, software-defined vehicle, domain controller, ISO 26262, ASIL, CAN FD, DDS, VISS, R24-11
Our Case Studies

































