
AI Camera Platform for Exterior Vehicle Access
Project in a Nutshell:
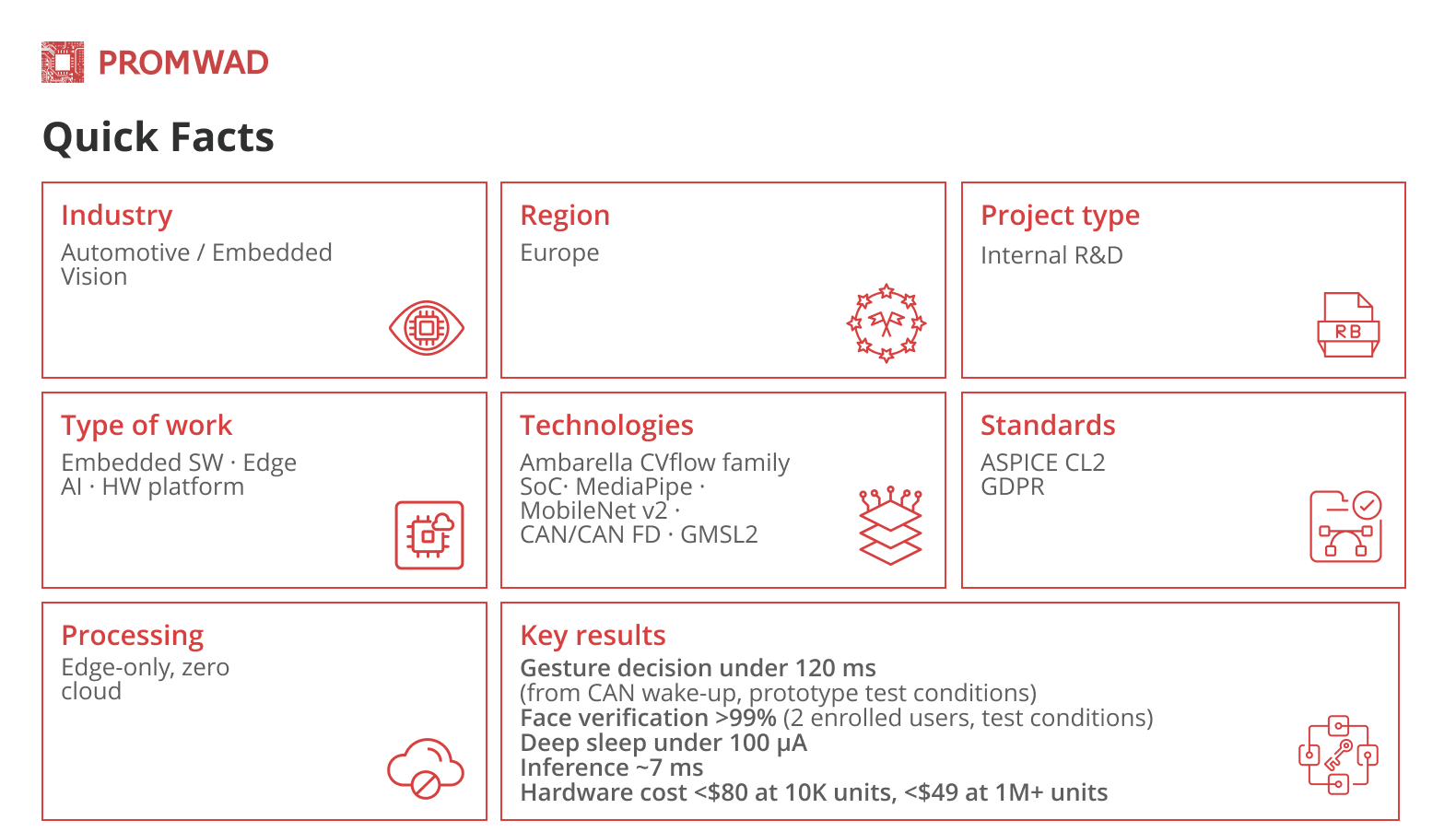
Promwad ran an internal R&D project to build a reusable AI camera platform for exterior automotive access. The goal: validate that gesture recognition, driver face identification, and parking surveillance can run on a single automotive-grade chip, within the latency and power constraints production requires, with ASPICE CL2 process readiness considered from the architecture stage.
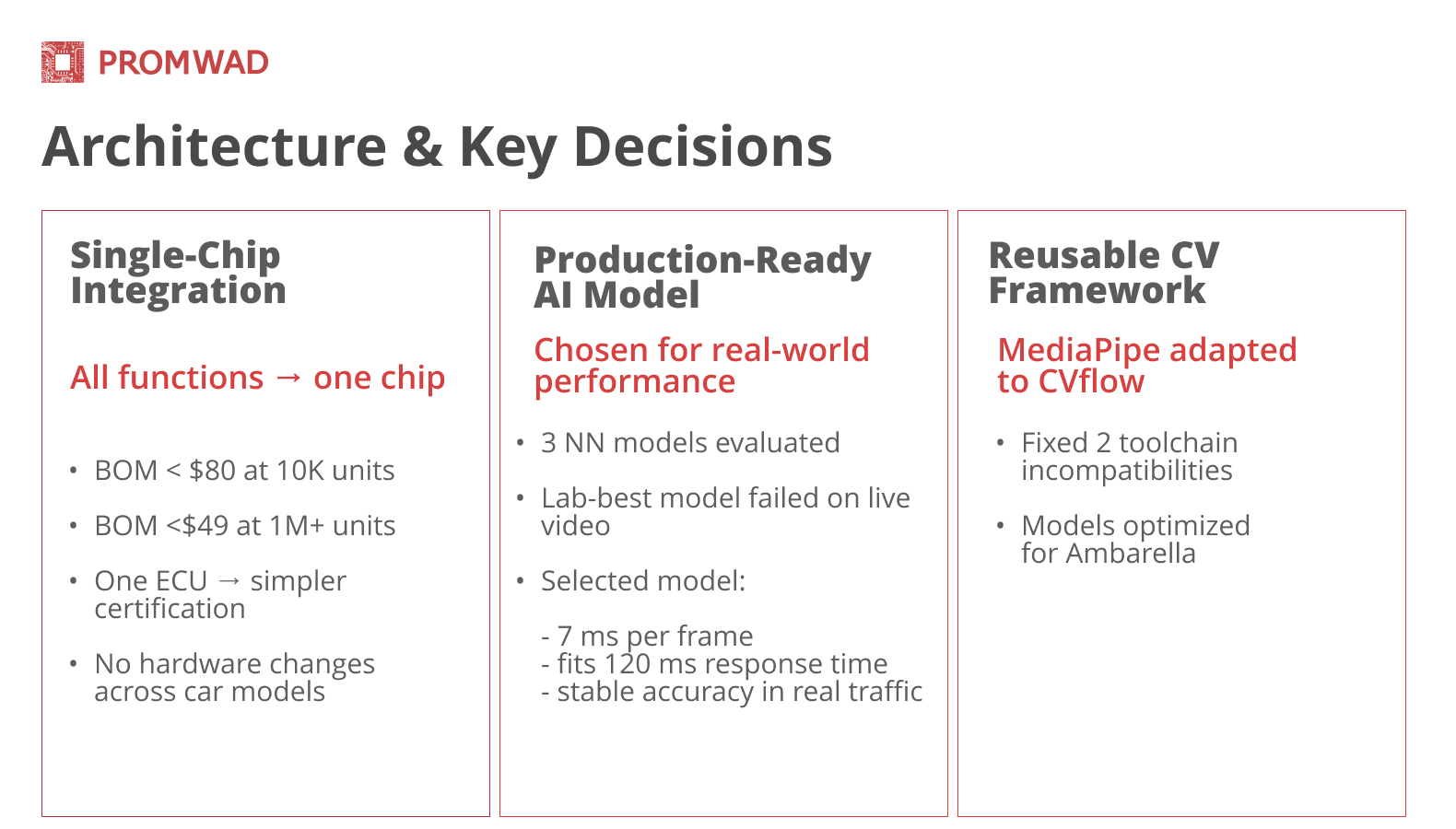
The platform delivers: gesture decision under 120ms, face recognition accuracy above 99%, deep sleep power under 100µA. Estimated hardware cost under $80 at 10K volume, under $49 at 1M+. All processing runs on-device, no cloud dependency.
Challenge
Biometric and gesture-based vehicle access systems have already entered mass production at many automakers in Asia and Europe; these include keyless entry systems with facial recognition and gesture-controlled door opening. Demand for such systems has taken hold. But most OEMs outside that early group are still stuck in R&D, blocked by the same three issues:
- Off-the-shelf computer vision models don't scale to automotive processors without significant custom work.
- Power budgets for always-on exterior cameras are tight enough that a wrong architectural choice can force a hardware redesign.
- ASPICE process requirements cannot be tacked on later; they must be integrated from the start.
Solution
Promwad built the platform to solve all three problems from a single hardware foundation.
The platform integrates gesture recognition, driver identification, and parking surveillance on a single Ambarella CVflow System-on-Chip. Mode switching is handled in firmware, so the same hardware works across different vehicle programs.
We chose the CVflow family because it runs image processing and AI inference on one automotive-grade chip suited to edge AI in automotive camera applications. The development process was aligned with ASPICE CL2 requirements from the start.
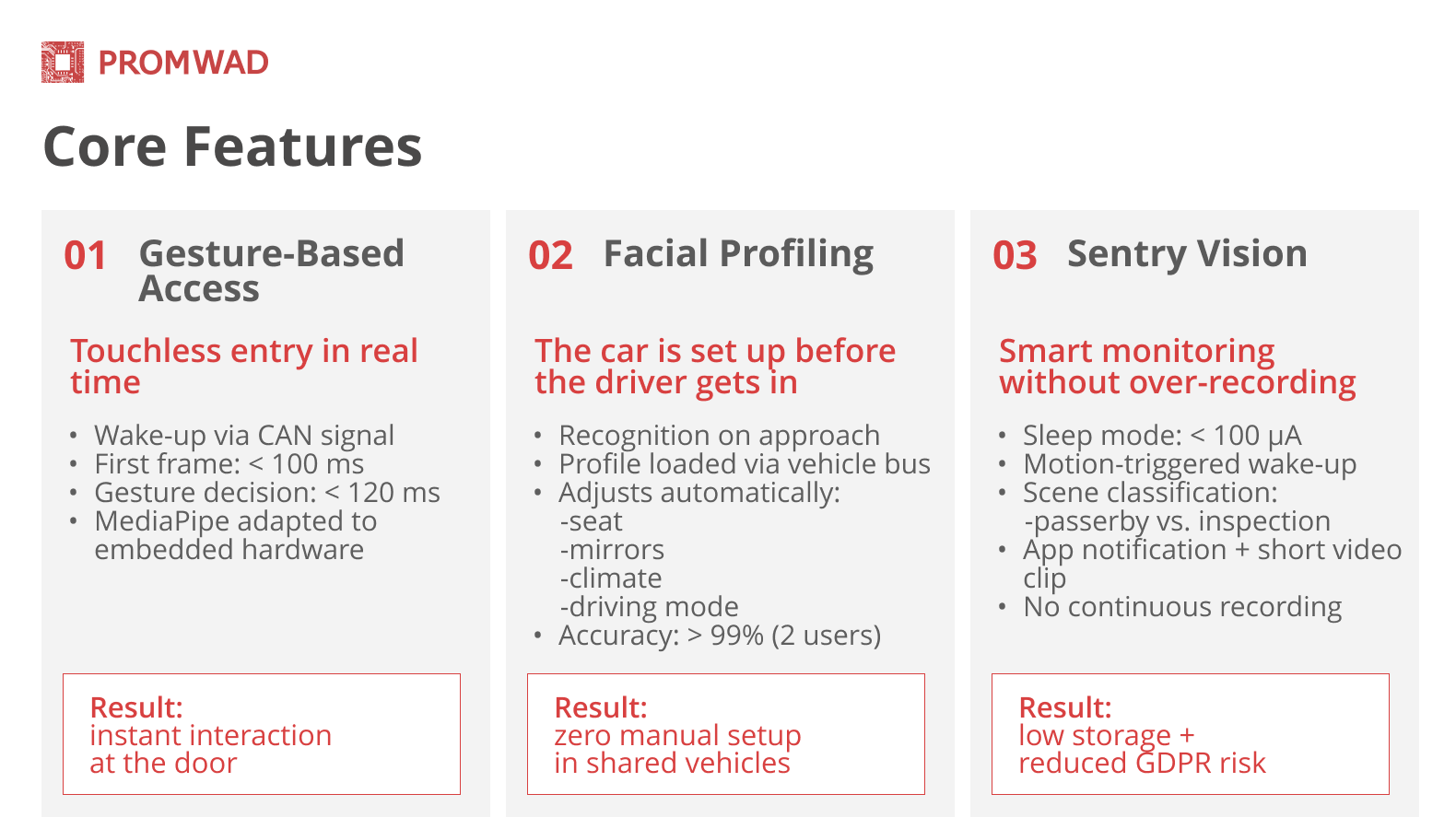
Gesture-based access. The prototype captures the first video frame within 100 ms after the CAN wake-up signal and returns a gesture decision within 120 ms, measured under the tested configuration. This is fast enough for everything to happen instantly at the door. The pipeline uses the Google MediaPipe framework, adapted to run on our hardware.
Facial profiling. Recognition begins as the driver approaches the vehicle. Once a match is confirmed, their personalized profile is loaded via the vehicle’s bus before they even sit down: seat position, mirrors, climate control, and driving mode. In a shared-use vehicle, this eliminates the need for manual adjustments every time the driver changes. In the prototype test setup, face verification accuracy exceeded 99% for two enrolled users under defined test conditions. Recognition runs entirely on-device, no biometric data leaves the vehicle.
Sentry Vision. While parked, the system sleeps at under 100µA. A motion trigger wakes it, the system classifies what it sees (someone walking past vs. inspecting the car), pushes a notification to the owner's app, and saves a short clip. No continuous recording reduces storage volume and supports privacy-by-design principles. Final GDPR compliance depends on retention policy, user consent, biometric data handling, and OEM deployment context.
Results
For automakers and Tier 1 suppliers launching development programs for external vision systems, this platform eliminates the configuration phase that typically delays production readiness. MediaPipe models have already been ported to CVflow, the system architecture has been validated, and the ASPICE CL2 process groundwork is already in place. The development team starts with a ready-to-use base version backed by proven test results, rather than starting from scratch.
The architecture scales within the existing ECU boundaries: additional gestures, more registered users for facial recognition, and integration with vehicle or fleet management applications. None of this requires hardware redesign.
What We Offer
The platform is available as a starting point for two types of engagements.
Adapt to your program. If you're building an exterior vision system for a vehicle or industrial product, we can adapt the platform to your hardware, use case, and integration requirements. Model porting, power validation, and ASPICE CL2 documentation groundwork are already done.
Proof of Concept. A fixed-scope engagement to validate gesture access and face recognition on your target vehicle, with defined success criteria and a clear production integration path at the end.
More of What We Do for Automotive Vision
- Automotive Vision Systems: explore our expertise in automotive camera systems for passenger cars, trucks, and commercial vehicles.
- Access Control System: see how we built and tested an embedded facial recognition system for car-sharing access control.
- Exploring Lattice FPGA for Digital Rear-View Mirrors: read our breakdown of why Lattice FPGAs work well for digital rear-view mirrors and camera-based ADAS.
FAQ
What types of automotive vision systems does Promwad develop?
We build custom camera platforms for passenger cars, trucks, commercial vehicles, and off-road machinery, including ADAS, driver monitoring, surround-view, digital mirrors, and exterior access systems like the one in this project. Our team covers the full stack: hardware, firmware, and AI model integration.
How does Promwad handle ASPICE compliance in vision system projects?
We integrate ASPICE process requirements from the architecture stage, not as a retrofit. In this project, ASPICE CL2 documentation groundwork — requirements traceability, design specifications, and test procedures — was built alongside the platform, so it's ready for OEM integration without re-engineering the process layer.
Can this platform be adapted to a different vehicle program or use case?
Yes. The architecture is designed for reuse: mode switching between gesture access, face recognition, and surveillance is handled in firmware, so the same hardware works across different vehicle models. Additional gestures, more registered users, or fleet management integration can be added within the existing ECU boundaries — no hardware redesign needed.
How do you port ML models to embedded automotive processors?
We adapt standard frameworks — such as Google MediaPipe or TensorFlow Lite — to run on the target SoC's inference engine. This includes resolving toolchain incompatibilities, optimizing model size and latency, and validating accuracy on real camera streams, not just lab data. Ported models become reusable assets for future projects on the same platform.
Which SoC platforms does Promwad use for edge AI in automotive applications?
We work with Ambarella CVflow, NVIDIA Jetson, and Renesas platforms. Platform choice depends on the project's inference requirements, power budget, and certification needs. In this project, Ambarella CVflow was selected because it combines image processing and AI inference on a single automotive-grade chip.







































